Eco driving control
Eco driving control is essential to determine the drivers who help their company reduce costs and those who wear and tear their vehicles. Using this feature the dispatcher can see the eco driving rank of the reporting vehicle for any period of time and each trip separately. This article provides a theoretical basis and practical recommendations that are important for setting up the eco driving control.
Theoretical background
The key characteristic that helps evaluate eco driving is acceleration. This physical quantity does not seem intuitively clear, so in the framework of training it can be compared with a more familiar quantity such as speed.
Speed and acceleration
The speed characterizes the change in position over a certain time interval:
v = S / Δt,
where v is the speed, S is the distance covered in the considered time interval (or the difference in the vehicle mileage at the end and the beginning of the trip), and Δt is the duration of the interval.
We can say this formula determines the average speed within the trip. But the shorter the time interval is considered the closer the result will be to the speed that is displayed on the vehicle’s speedometer.
Acceleration characterizes the change in speed over a certain time interval:
a = Δv / Δt,
where a is the acceleration, Δv is the difference in speed at the end and at the beginning of the considered time interval, and Δt is the duration of the interval.
The average value of the acceleration per trip is almost never used in the analysis of the movement of the vehicle, so it makes sense to calculate only the acceleration over the minimum time interval.
Units of measurement
The unit of speed in the International System of Units (SI) is the meters per second (m/s), but in everyday life, we commonly use the off-system unit of measurement which is the kilometers per hour (km/h).
The SI unit for acceleration is meter per second squared (m/s²), but other off-system units like g or kmph/s unit are used more often. We use g in Wialon, while kmph/s is not supported.
g is the acceleration due to gravity on the surface of the Earth, it equals to 9.80665 m/s² (the approximation g ≈ 10 m/s² is often used). In our case, this is the standard value by which the acceleration value is divided in order to compare with something more familiar (as pressure is often displayed not in pascals, but in standard atmospheres).
An acceleration of 1 g corresponds to an acceleration from 0 to 100 km/h in 2.83 seconds.
The following table helps to form an idea of the average value of acceleration (in m/s², kmph/s, g) for various types of movement:
| Movement type | Average acceleration (m/s²) | Average acceleration (kmph/s) | Average acceleration (g) |
|---|---|---|---|
| Passenger lift | 0.9–1.6 | 3.2–5.6 | 0.09–0.16 |
| Subway train | 1 | 3.5 | 0.1 |
| Short distance runner | 1.5 | 5.3 | 0.15 |
| Cyclist | 1.7 | 6 | 0.17 |
| Passenger car | 2.5–3 | 8.8–10.6 | 0.25–0.3 |
| Motorbike | 3–6 | 10.6–21.2 | 0.3–0.6 |
| Racing car | 8–9 | 28–32 | 0.8–0.9 |
| Emergency vehicle braking | up to 20 | up to 70 | up to 2 |
| Spacecraft launch/landing | 40–60 | 140–210 | 4–6 |
| Jet aircraft maneuver | up to 100 | up to 350 | up to 10 |
Example of calculation of speed and acceleration
Using the formulas above, let’s calculate the speed and acceleration based on the unit’s coordinates received from the tracker.
As part of the example, we will count the time from 0 seconds. For simplicity, we will assume that the vehicle always moved in a straight line, and it’s speed changed uniformly between messages.
| Message number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| Time, s | 0 | 5 | 10 | 20 | 40 | 70 | 100 | 103 |
| Distance, m | 0 | 0 | 25 | 150 | 400 | 900 | 1400 | 1430 |
| Speed, km/h | 0 | 0 | 18 | 45 | 45 | 60 | 60 | 0 |
| Acceleration, g | 0.000 | 0.000 | 0.102 | 0.077 | 0.000 | 0.014 | 0.000 | -0.567 |
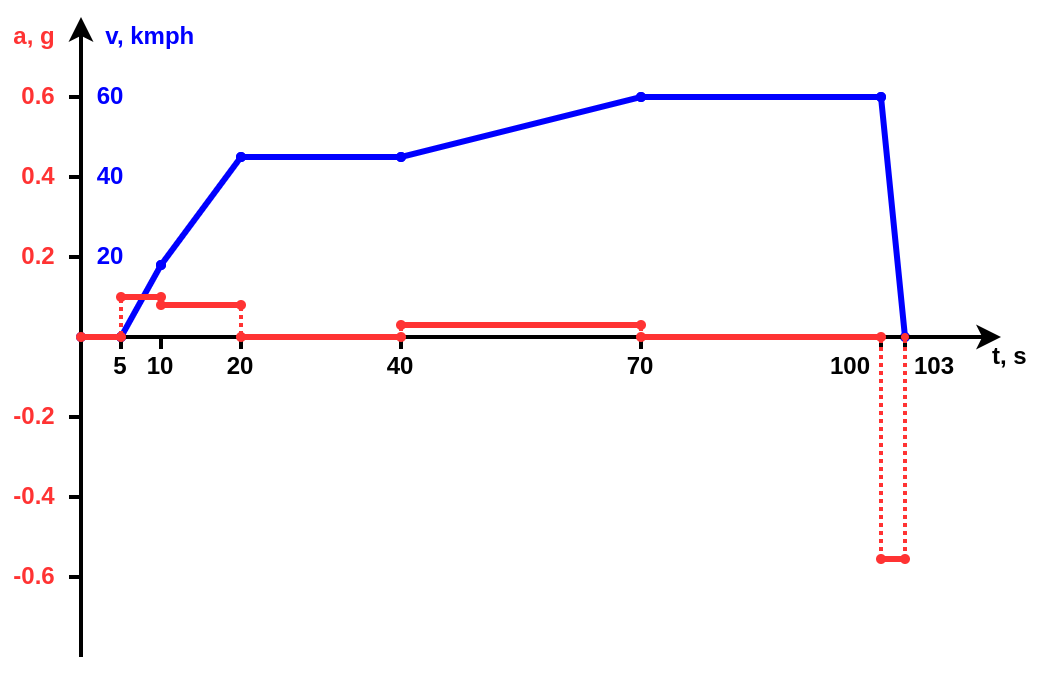
Based on the table and chart, we come to the following conclusions:
- The speed is 0 when the vehicle does not change position.
- Acceleration is 0 when the vehicle does not change speed (stands still or moves at the same speed).
- A positive acceleration value corresponds to an increase in speed and a negative value to a deceleration.
- The amount of acceleration indicates how quickly and how much the speed has changed between messages.
This example allows us to evaluate the relationship between position, velocity, and acceleration. The data coming from a real vehicle may differ from those given in the example as it contains simplifications.
Accelerometers
Accelerometers are devices for measuring acceleration. Modern technologies make it possible to create miniature accelerometers that are less than one millimeter in size. They are widespread and used in many types of technological equipment: smartphones, fitness bracelets, trackers, vehicles, etc.
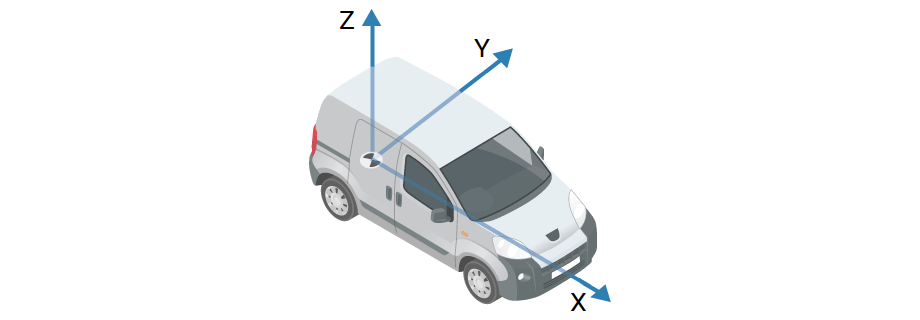
Since acceleration is a vector quantity, meaning, it has a direction, its full measurement requires three accelerometers installed perpendicular to each other. Together they form one three-axis accelerometer, where, for example, the X-axis shows acceleration or deceleration, the Y-axis shows turns, and the Z-axis shows ascents and descents.
A tracker with an accelerometer or a separate accelerometer sensor may have axes drawn on the body, it must be placed on the vehicle according to them.
There is no single rule for the direction or naming of axes. That is, the Z axis can be directed not up but down, or instead of the X axis, the Y axis can be directed forward. This information can found in the device documentation.
When installing the device on a vehicle, make sure it is firmly fixed.
It will not be possible to install the accelerometer perfectly evenly on the unit, therefore it requires calibration after installation. In general, the calibration procedure involves several stages: driving in a straight line, turns, smooth and hard braking, driving with and without violations. However, for different devices, the calibration can vary significantly. You can learn about it from the device documentation.
Since accelerometers and trackers use the same element base (microcircuits), their readings will not differ by more than 15% (and if the calibration is performed correctly, this value will be even less).
Implementation in Wialon
The general logic of eco driving control in Wialon can be represented as follows:
- Creating rules (all the relevant settings and criteria) for further evaluation takes place in the properties of the unit on the Eco Driving tab.
- Evaluation of messages by criteria occurs when running a report with certain tables (Eco Driving table or some others) or when working with the Eco Driving app.
Further attention will be focused on the points that most often raise questions from users.
General setting approach
Eco driving settings depend on the data coming from the tracker. All the existing approaches are described below and sorted by accuracy from highest to lowest.
| Types of trackers | Accuracy | Difficulty of settings | Calculate acceleration by | Message frequency | Sensors creation | Criteria for acceleration control |
|---|---|---|---|---|---|---|
| 1. Tracker sends calculated eco driving parameters | High | Easy | Eco driving parameters | Any | Not required | Acceleration, braking,turn, reckless driving |
| 2. Tracker sends calculated acceleration parameters in a custom format | High | Average | No matter | Any | Required | Custom |
| 3. Tracker sends raw values of acceleration along the axes | Average | High | No matter | 1 per 2 seconds | Required | Custom |
| 4. Tracker does not send any data of acceleration | Low | Easy | GPS | 1 per 2 seconds | Not required | Acceleration, braking, turn, reckless driving |
Here are some details on each of the approaches:
1. Tracker sends calculated eco driving parameters
This approach applies only to certain types of devices that use special algorithms for processing data from the accelerometer. You can find the list of them on the wialon.com website in the Integrated devices section using the ECO driving filter.
In Wialon, eco driving parameters are wln_accel_max, wln_brk_max, and wln_crn_max. To simplify, we can say that these parameters contain values corresponding to the maximum acceleration recorded between two consecutive messages. This allows you to set the tracker to any frequency of saving messages without affecting the accuracy of the result.
The system recognizes such parameters automatically, so there is no need to create additional sensors. It is enough to set up the calculation of acceleration by the eco driving parameters and create criteria with the Acceleration, Braking, Turn, and Reckless driving types.
2. Tracker sends calculated acceleration parameters in a custom format
Such trackers also use special algorithms for processing data from the accelerometer, which allows you to set the tracker to any frequency of saving messages without affecting the accuracy of the result.
However, these trackers send information about acceleration in a custom format, and therefore the system does not recognize such parameters automatically. Thus, to take them into account, it is necessary to create sensors (it is most logical to select the Accelerometer type), and then, based on these sensors, create criteria with the Custom type.
3. Tracker sends raw values of acceleration along the axes
If trackers do not have special algorithms for processing data from the accelerometer, then they send parameters with readings along three axes at the time the message is generated. In this case, the higher the frequency of saving messages, the higher the accuracy of the result, however, this will lead to an increase in the GPRS traffic consumed by the tracker. The recommended frequency is one message every two seconds.
Such parameters are not automatically recognized by the system, therefore, to take them into account, it is necessary to create two sensors (it is most logical to choose the Accelerometer type): one will be based on the parameter from the X axis (a positive value will correspond to acceleration, and a negative value will correlate with deceleration), and the second will be based on the parameter from the Y-axis (a positive value will indicate turns in one direction, and a negative value will show turns in the other direction). The Z-axis is associated with vertical acceleration and will not be used for calculations. Then, based on these two sensors, create criteria with the Custom type.
This type of device may not have a calibration procedure, which requires individual settings for each axis to obtain accurate acceleration readings.
It is worth repeating that there is no single rule for the direction or name of the axes. You can find out the directions of the axes of your device from its documentation.
4. Tracker does not send any data of acceleration
If the trackers do not have an accelerometer, that is, they cannot measure acceleration, then it can be calculated mathematically from GPS data. In this case, the higher the frequency of saving messages, the higher the accuracy of the result, but this will lead to an increase in the GPRS traffic consumed by the tracker. The recommended frequency is one message every two seconds.
Next, you need to set up the calculation of acceleration by GPS and create criteria with the Acceleration, Braking, Turn, and Reckless driving types.
If the tracker does not send information about the direction of movement (the course parameter), then the system will not be able to detect violations according to the criteria with the Turn type.
Recommended criteria values
The value of acceleration when driving a vehicle depends on many factors: engine power, the technical condition of the vehicle, vehicle weight, body load, tire grip, road surface quality, meteorological conditions, etc. Because of this, the generally recommended standards of acceleration when driving a vehicle do not exist.
The source of information about average values of acceleration in various situations (smooth acceleration, sharp turn, emergency braking, etc.) can be specialized literature, which contains information about specific vehicle models. It would also be possible to adjust to the values that insurance companies use, however, due to the nature of their activities, they do not publish such information in open access.
Based on this, it is worth setting the right expectations from the Eco Driving module. It allows you to detect violations following the configured criteria and perform a comparative assessment of several units or drivers.
Criteria presets
To simplify the criteria settings, Wialon has three standard presets: for an automobile, a truck, and a bus. With their help, you can get several criteria at once, which can be left in their original form, changed a little, or simply used as an example for self-configuration.
If you use standard criteria presets for different units, then even if you are not sure about the correctness of the values in the criteria, you will be able to see the relative score obtained by the same rules. This should be enough for comparison within the same fleet.
It is also a good recommendation to test the criteria in practice. To do this, it is enough to make several trips on the vehicle: in one it is worth adhering to a normal driving style, and in the other, try to commit the very violations that should be monitored further. After that, it will be enough to view messages from the tracker or run a report with the Eco Driving table in order to determine the acceleration values for different driving styles, and then, based on them, determine the boundaries for violations.
